Mechatronics Lab Professor — SJSU
Stepper Motor
Stepper motor control lab teaching full-step and half-step excitation sequences, microstepping concepts, acceleration profiles, and driver circuit design.
Lab 8: Stepper Motor dove into the principles of open-loop precision motion using stepper motors — a workhorse actuator in CNC machines, 3D printers, and robotics. Students learned why steppers are chosen for applications requiring precise angular positioning without the cost of a feedback encoder, and when their limitations (missed steps under load, resonance) make servos the better choice.
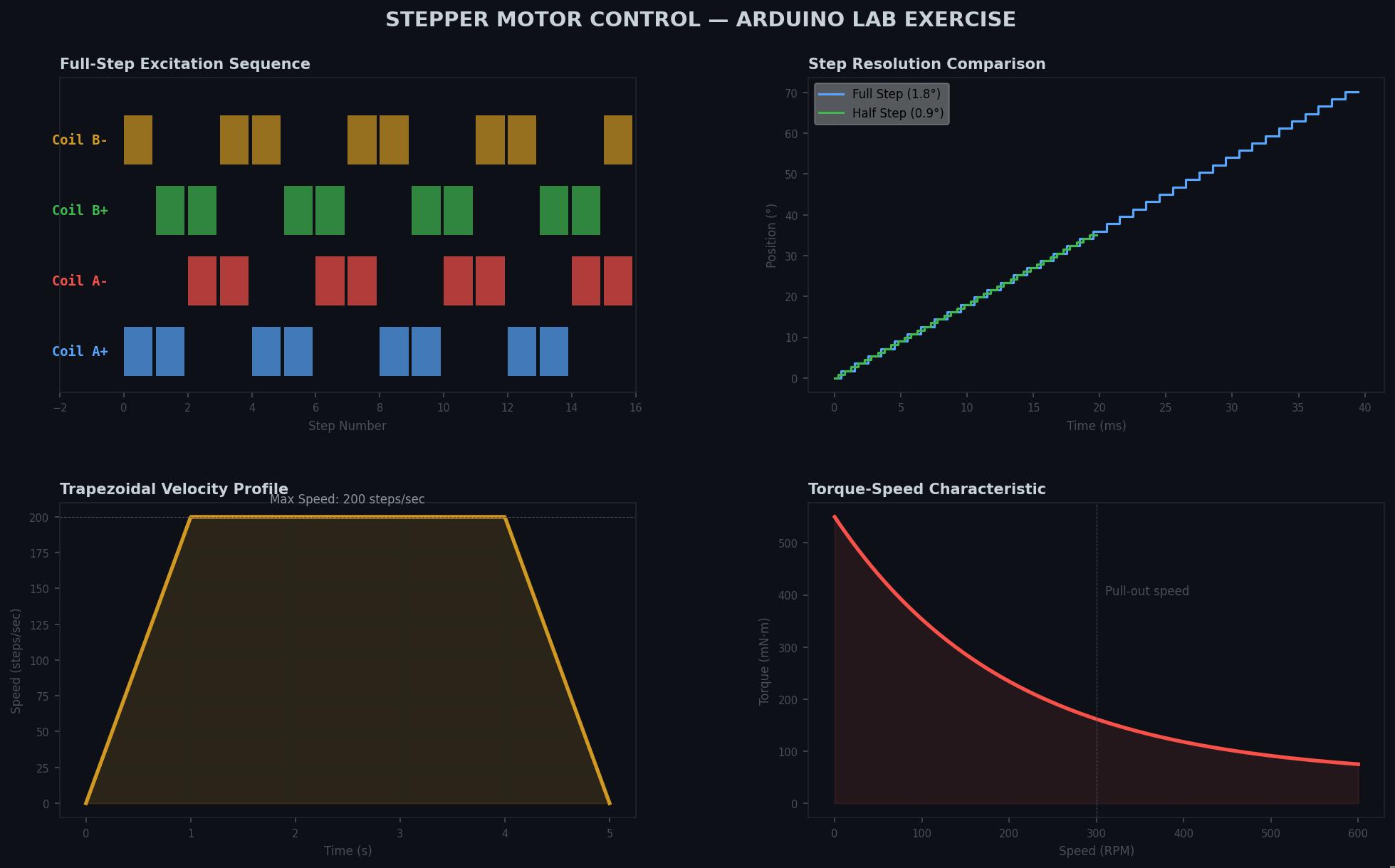
The lab began with coil excitation fundamentals: students manually sequenced the four phases of a bipolar stepper in full-step, half-step, and wave-drive modes, observing how the excitation pattern affects step angle, torque, and vibration. Using a ULN2003 or A4988 driver board, they progressed to microstepping and discussed the trade-off between resolution and holding torque.
Speed control exercises had students implement trapezoidal acceleration profiles — ramping step frequency up and down to avoid stalling at high speeds. The lab concluded with a positioning challenge: move the shaft to a target angle within ±1 step accuracy, as fast as possible, without missing steps. Students characterized the torque-speed curve of their motor and learned how to select a stepper for a given application based on required torque, speed, and resolution.