Mechatronics Lab Professor — SJSU
Printer Carriage
Integrative mechatronics lab where students built a printer carriage system combining DC motor control, linear motion, limit switches, and position feedback.
Lab 6: Printer Carriage was the first true system-integration exercise in the course, combining motor control, linear motion mechanics, limit-switch homing, and position feedback into a functional carriage assembly. It challenged students to think beyond individual components and design a complete mechatronic subsystem — the same mindset required in industry for robotics and automation.
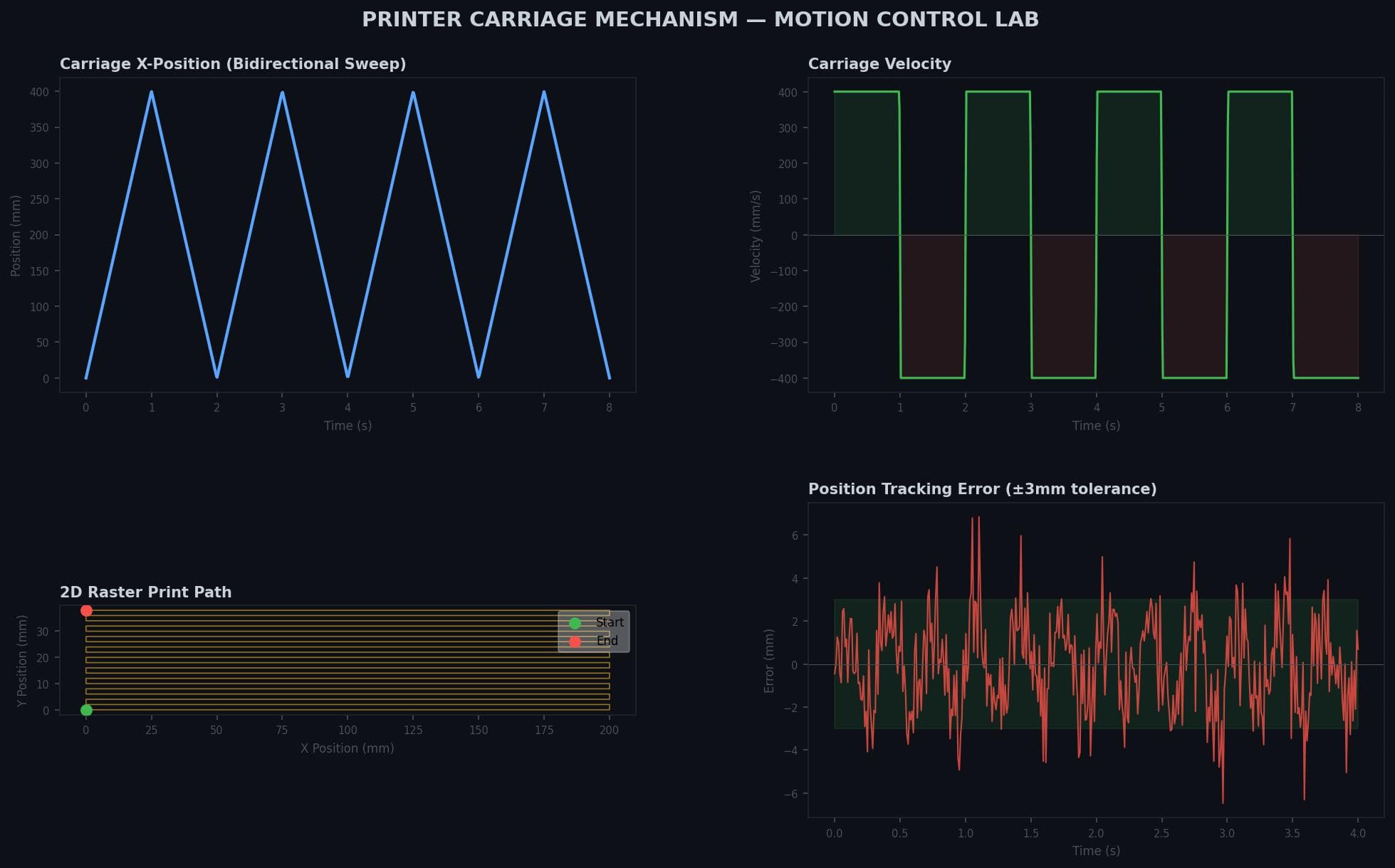
Students drove a DC motor through an H-bridge to produce bidirectional linear travel along a rail, implemented limit-switch homing routines to establish a known reference position, and used either encoder counts or timed open-loop moves to position the carriage at target locations. The lab emphasized real-time software-hardware integration: reading switch states, commanding motor direction and PWM duty cycle, and sequencing moves — all within a single Arduino sketch.
A final challenge required students to execute a multi-point sweep pattern — moving the carriage to a sequence of programmed positions, pausing briefly at each, and returning home. Accuracy was evaluated against ruler measurements on the rail. Students who finished early experimented with acceleration ramps and PID-based position control to improve accuracy and reduce overshoot. This lab consistently received the highest engagement scores in post-course surveys because students could see and feel their code driving a physical mechanism in real time.