GCM
Cosmetic Inspection System
Designed and built an automated cosmetic inspection system to lift a $2M financial burden by imaging parts for hardware detection and cosmetic defects.
Created in February 2023, this system was designed to lift a $2M financial burden by automatically imaging parts for hardware detection and cosmetic defects.
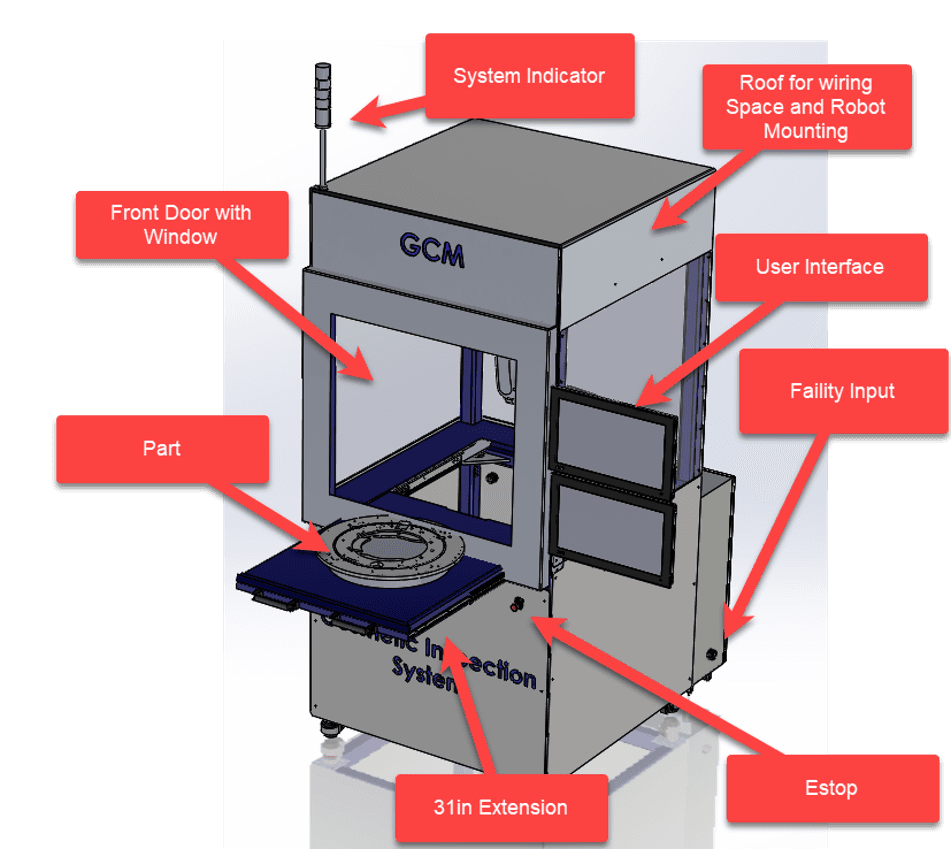
The system features a steel tube frame, robotic arm, camera, safety locking mechanism, user interface, and PDF report generation.
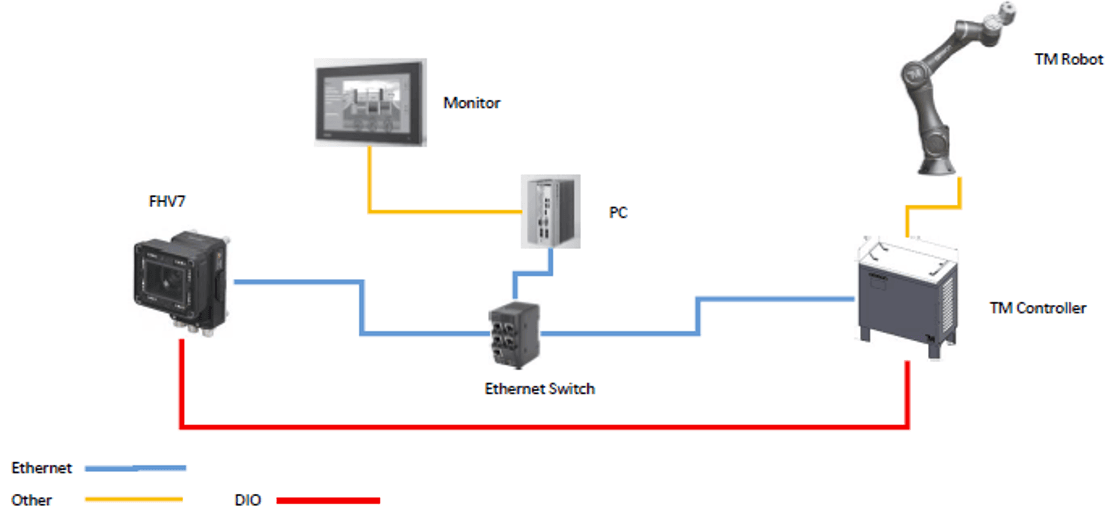
Capable of detecting scratching (20–100 micron), fingerprints, hardware (helicoils), serial numbers/barcodes, and hole dimensions.
Computer VisionAutomationQuality Control